【科普中国军事科技】灵巧作业无人机实现“精准操控”究竟有多难
时间:2022-11-24 15:02:52 来源:科普之家 作者:光明科普 栏目:军事 阅读:219
无人机(UAV:Unmanned Aerial Vehicle)按照技术特征分类,可分为固定翼无人机、多旋翼无人机、复合翼无人机和无人直升机等等,这些无人机都是通过无线通讯技术及自身控制系统实现来不载人的飞行。大多数无人机在起飞、作业、降落的过程中,需要实时搜集和计算大量信息,来维持平稳飞行并完成作业任务。无人机在复杂危险环境中的控制难度较大,容易被干扰、故障等多类风险因素影响,存在信号丢失、精度差、失稳等问题。要在控制自身安全稳定的前提下,进一步执行灵巧空中作业任务,就更是难上加难。
在灾后废墟、通讯基础设施受损等非结构化、无序、混乱条件下,空中作业需要克服由作业任务和对象带来的晃动和质心变化等影响,例如抓取和投放物资等。北京航空航天大学“飞行器先进导航与控制系统技术”科技部重点领域创新团队在负责人郭雷教授带领下,系统性地提出了复合干扰分离与估计、具有适应可变性能的复合抗干扰控制等方法,突破了仿生优化设计、浮动基座变质心高精度指向控制等关键技术,研发了一款空中灵巧作业无人机系统。
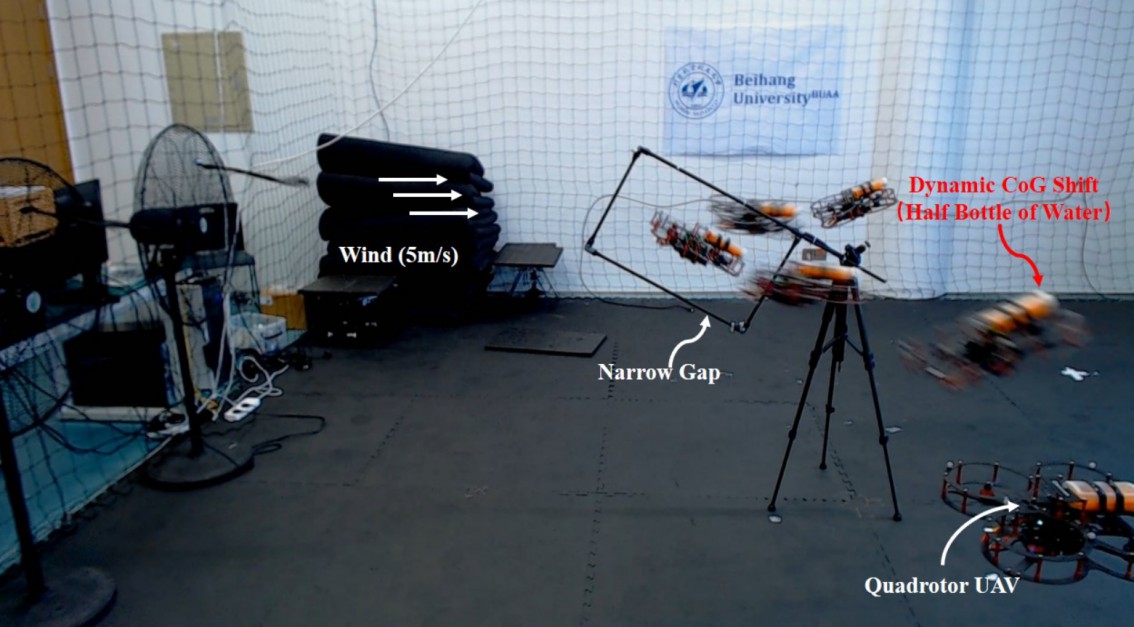
进行风力干扰测试中的无人机
无人机普遍被用在人类难以涉及的环境,比如高温高压等危险、极端、特殊、恶劣场景。在高危环境中,由于外部情况复杂,操控人员如果想要进行正常的机器操作和视频记录,则对无人机采集图像的稳定性要求极高。这就对飞控的抗干扰能力提出了新要求,如果不够平稳,则会出现“果冻”效应。航拍领域中所说的“果冻”效应是由于机身震动过大、减震球不合适等因素造成照片、视频中出现抖动现象,由于神似被戳动的果冻而被成为“果冻”效应。
因无人机的机构振动导致的“果冻”效应,正是一种典型的飞行干扰。应用郭雷教授的复合精细抗干扰控制方法,综合分析模型误差、内部噪声、质心偏移以及外部扰动等复合干扰,进而分离识别与抑制补偿,使得“灵巧作业”精准度显著提高。
既然叫做灵巧作业无人机,那么其灵巧程度就成了衡量关键。在航空航天领域,最有代表性的就是空间非合作目标的在轨抓捕测试。空间非合作目标的在轨抓捕与一般合作目标的抓捕不同,其最主要的特点就是目标具有非合作性——即不具有抓捕所需要的专用接口,并且不提供任何用于对其进行抓捕的有效信息。
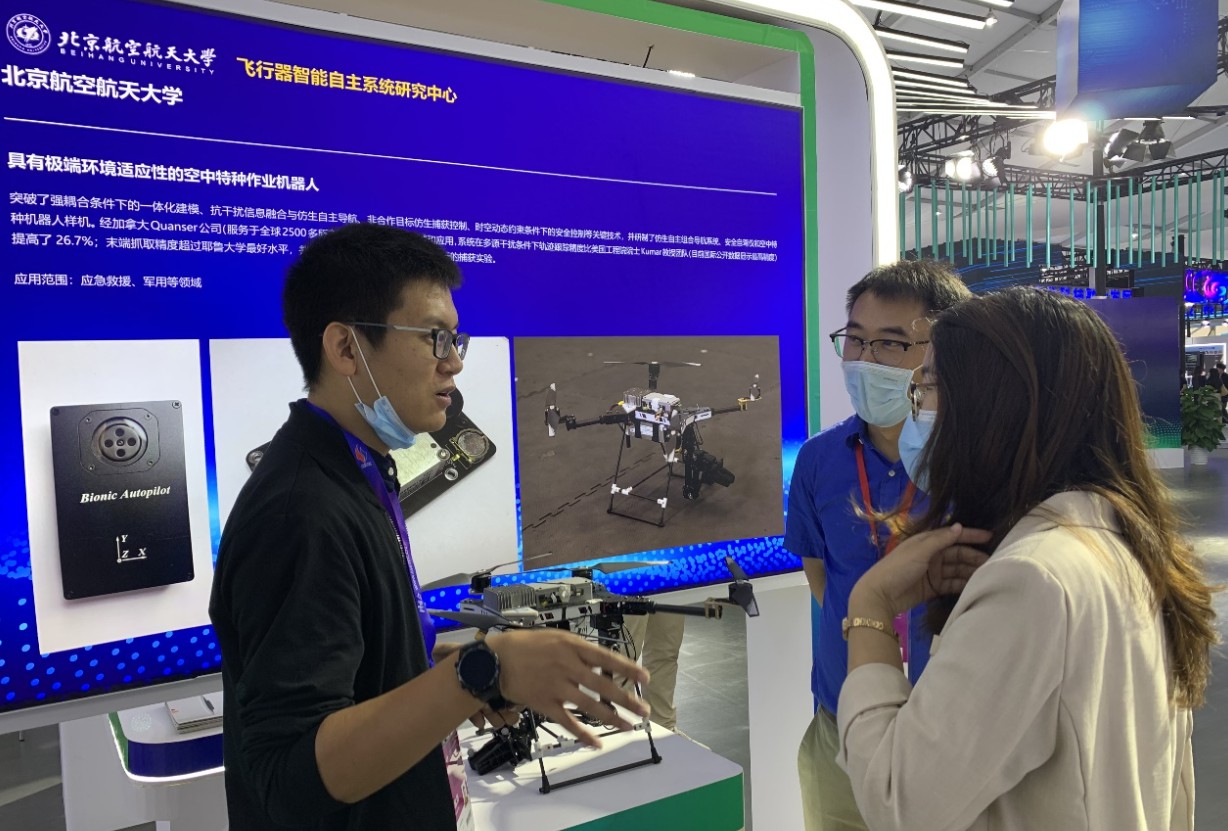
团队受邀参加2021年“中国机器人峰会”和“北京国际科技博览会”
团队针对抓捕目标的非合作特性,以抗干扰位姿估计与复合精细抗干扰控制方法为技术背景,研究抓捕非合作目标过程中的目标识别与捕获控制问题,首次完成了空中非合作目标捕获测试。团队余翔教授介绍目前达到了毫米级的末端控制精度,属于目前已知的国际最高精度。多用于航天领域的“空间非合作目标的在轨抓捕测试”首次在无人机领域完成,这是国内无人机领域的一个创新,更是灵巧无人机作业精度的体现。
未来,在应急救援、感知安监等多个领域,灵巧作业无人机均有广阔的应用场景。团队将研究方向从任务需求场景出发,以系统总体为研究视角,经过一体化设计,来提高灵巧无人机的作业精度。无人机的智能化升级迭代,不断深入细分领域方向,也必将使得中国无人机在准度、精度、安全上走在全球前列。
专家简介:王腾,军事装备科普专家,陆军装甲兵学院硕士研究生学历,先后在中央电视台、人民日报从事一线军事新闻工作,参加策划并制作多个军事科技专题。长期对国内外高科技装备、各兵种主战装备等方面进行科普研究,先后在《人民日报海外版》、《法制日报》、《科普中国》等平台发表文章,获“国家信息化领导小组”颁发的先进个人奖项。
出品:科普中国军事科技前沿
作者:王腾
策划:金赫
监制:光明网科普事业部
本文链接:https://www.bjjcc.cn/kepu/59520.html,文章来源:科普之家,作者:光明科普,版权归作者所有,如需转载请注明来源和作者,否则将追究法律责任!